About Project
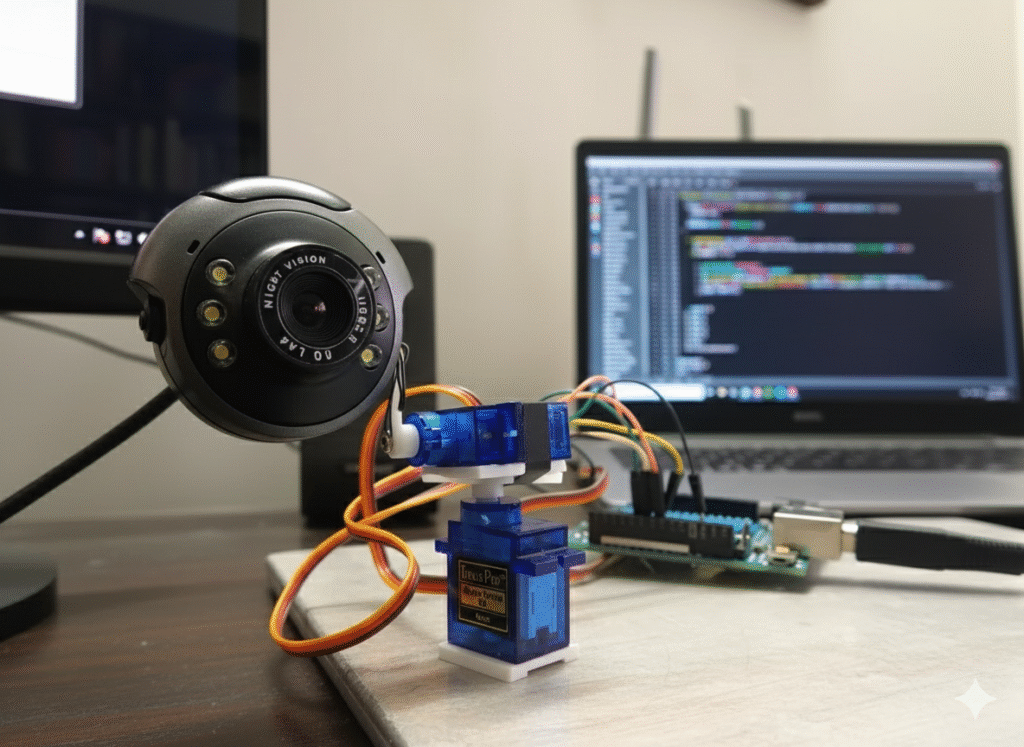
This project is a real-time face tracking device that combines computer vision and embedded systems. Using Python’s OpenCV library, the system detects and tracks faces within a video frame. It then communicates with an Arduino UNO via serial connection to control servo motors, allowing the camera to automatically follow the detected face and keep it centered in view. The project demonstrates the integration of AI-based image processing with hardware control, showcasing the potential of computer vision in robotics and automation.
⚙️ Project Features – Face Tracking System
Real-Time Face Detection
Detects faces instantly using OpenCV’s pre-trained Haar Cascade classifier.
Automatic Camera Movement
Controls servo motors through Arduino to keep the detected face centered in the frame.
Python–Arduino Integration
Uses serial communication for smooth data exchange between software and hardware.
Accurate Tracking Algorithm
Adjusts servo angles dynamically for precise and responsive motion.
Customizable Tracking Range
Allows modification of sensitivity and movement limits to suit different setups.
User-Friendly Implementation
Simple hardware connections and easy-to-run Python script — ideal for beginners in computer vision.
Low-Cost Prototype
Built with affordable components like Arduino UNO, USB camera, and micro servos.
Expandable Design
Can be upgraded for full facial recognition, gesture tracking, or robotic vision systems.