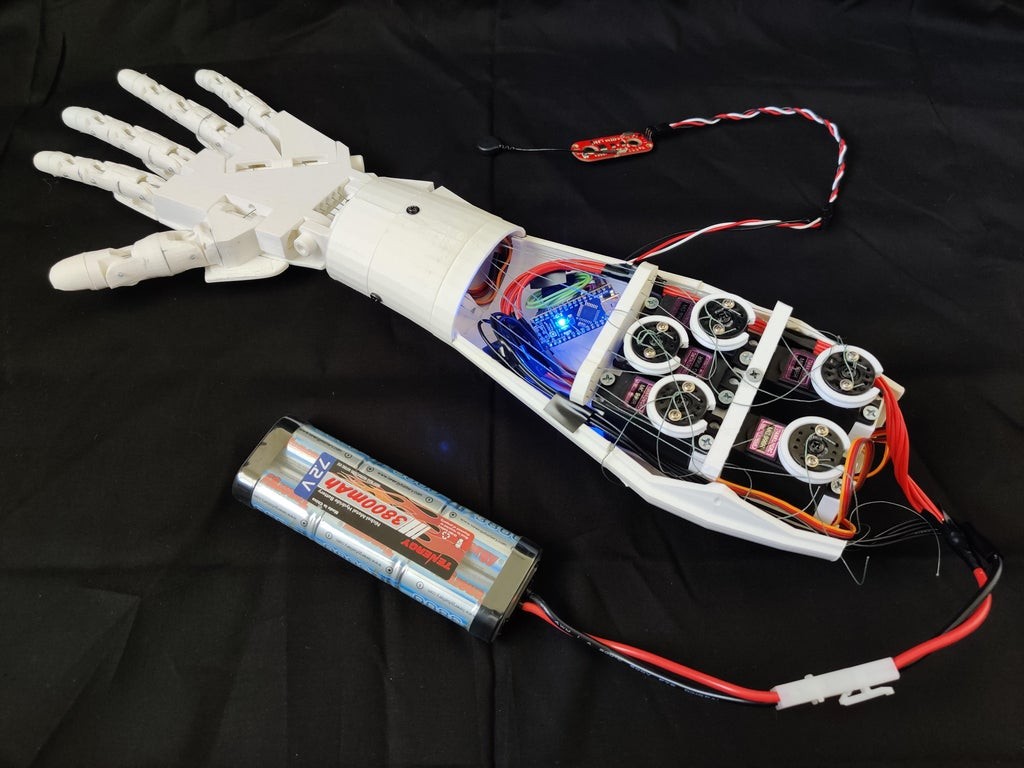
A low-cost 3D-printed prosthetic hand controlled by EMG muscle signals. The system uses Arduino and servo motors to replicate natural finger movements based on real-time muscle activity, offering an accessible and customizable solution for people with upper limb loss.
🧠 Detailed Description
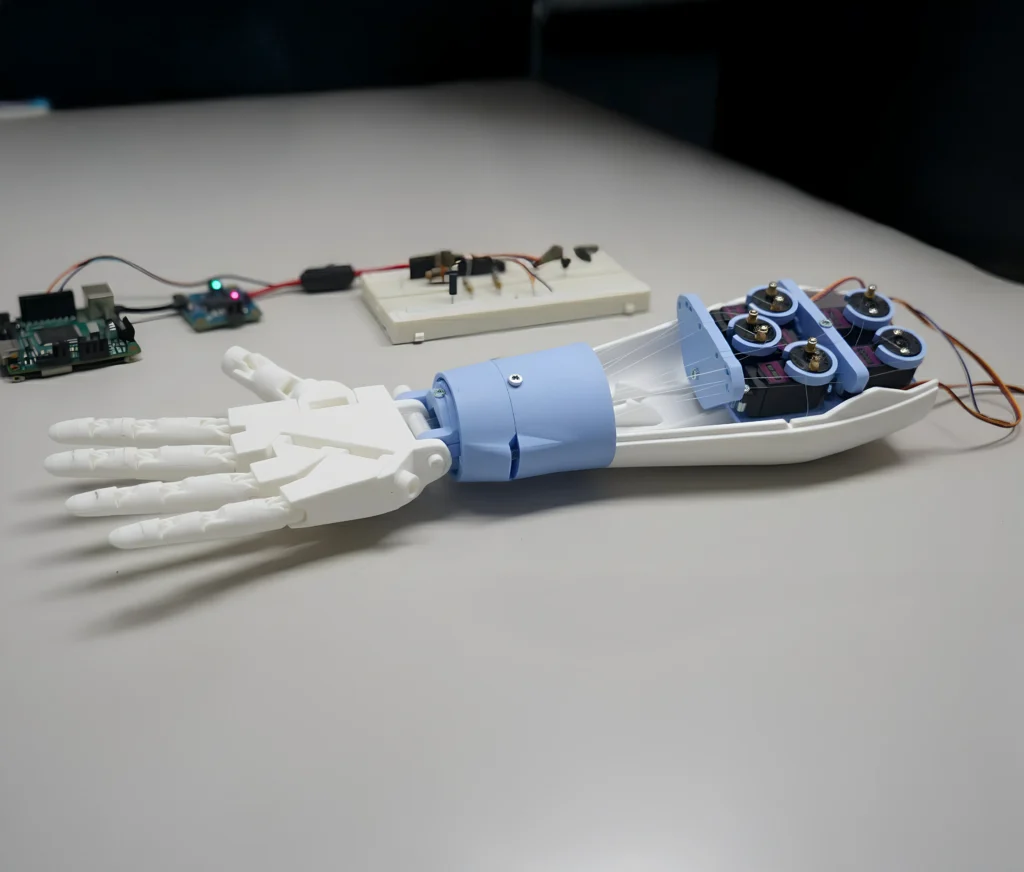
The 3D Printed EMG-Controlled Prosthetic Hand is an innovative biomedical project that combines electromyography (EMG) and 3D printing technologies to create a functional, affordable, and customizable prosthetic solution.
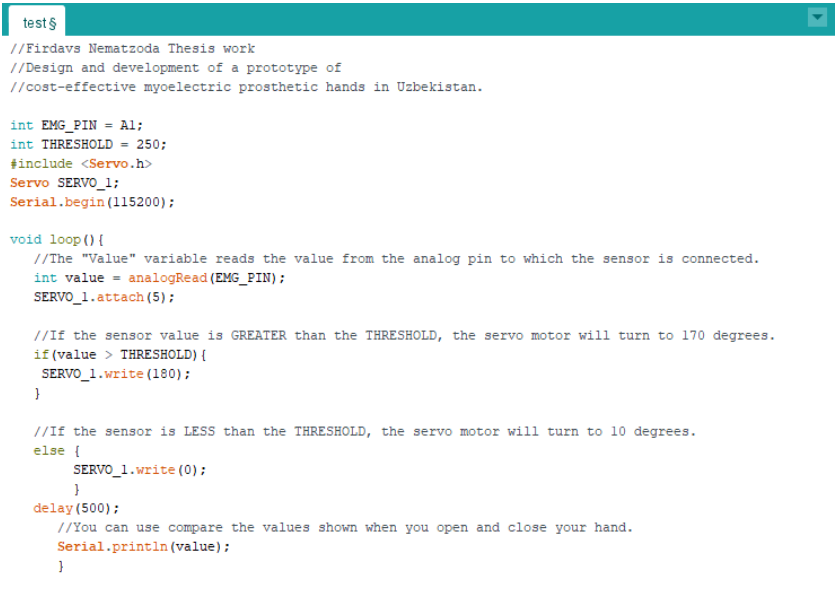
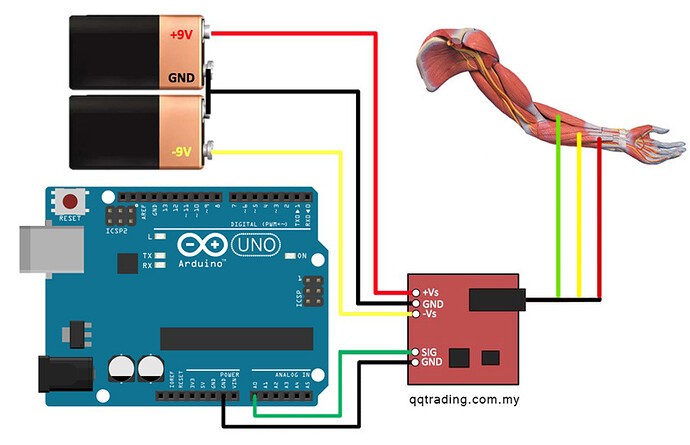
Using surface EMG sensors, the system detects electrical signals generated by the user’s forearm muscles. These signals are processed by an Arduino UNO microcontroller, which interprets muscle activity and sends precise control commands to five high-torque servo motors — each responsible for the motion of one finger.
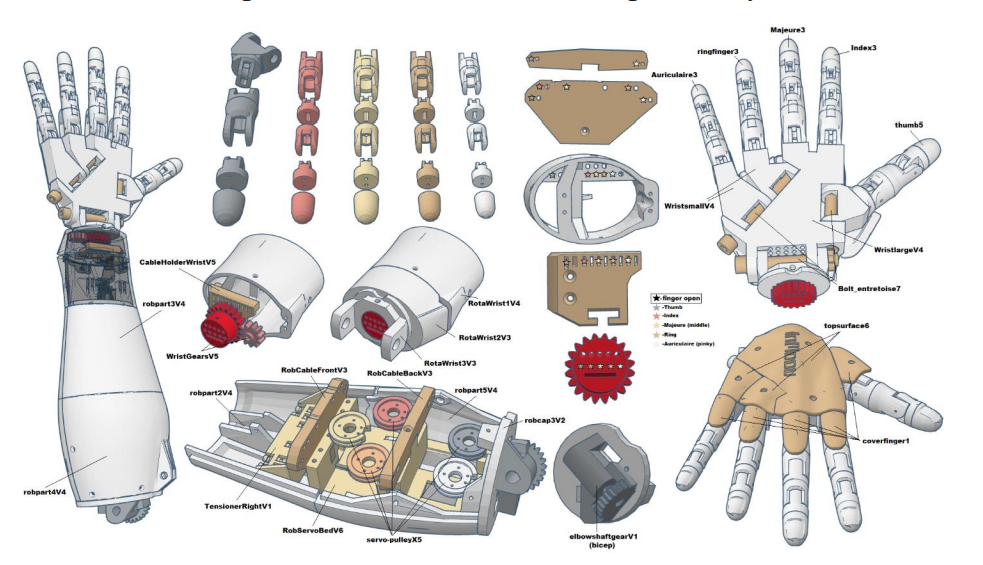
All mechanical parts, including the palm, fingers, and forearm casing, are 3D-printed using PLA material to ensure light weight, durability, and ergonomic comfort. The fishing-line tendon mechanism replicates the natural closing and opening of a human hand, offering smooth and realistic movement.
This project demonstrates how accessible technologies like Arduino and desktop 3D printers can be used to design functional prosthetics that are both cost-effective and educational. While it doesn’t aim to replace advanced clinical prosthetics, it successfully proves that practical and responsive artificial limbs can be built with minimal resources — bridging the gap between academic innovation and real-world application.